Class OBB
Summary
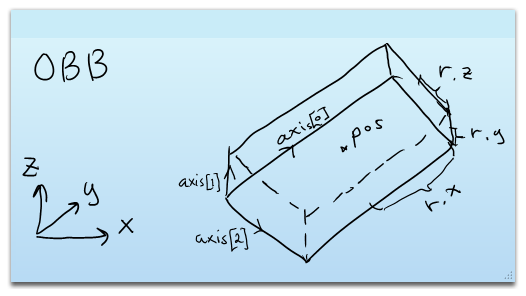
A 3D arbitrarily oriented bounding box.
Description
This data structure represents a box in 3D space. The local axes of this box can be arbitrarily oriented/rotated with respect to the global world coordinate system. This allows OBBs to more tightly bound objects than AABBs do, which always align with the world space axes. This flexibility has the drawback that the geometry tests and operations involving OBBs are more costly, and representing an OBB in memory takes more space (15 floats vs 6 floats).
 OBB
OBB
